 Написать в WhatsApp
Написать в WhatsApp

Александр Ситников (Кировская обл.)
Рассматриваемая в статье схема позволяет осуществить безударный пуск и торможение электродвигателя, увеличить срок службы оборудования и снизить нагрузку на электросеть. Плавный пуск достигается путём регулирования напряжения на обмотках двигателя силовыми тиристорами.
Устройства плавного пуска (УПП) широко применяются в различных электроприводах. Структурная схема разработанного УПП приведена на рисунке 1, а диаграмма работы УПП – на рисунке 2. Основой УПП являются три пары встречно-параллельных тиристоров VS1 – VS6, включенных в разрыв каждой из фаз. Плавный пуск осуществляется за счёт постепенного

увеличения прикладываемого к обмоткам электродвигателя сетевого напряжения от некоторого начального значения Uначдо номинального Uном. Это достигается путём постепенного увеличения угла проводимости тиристоров VS1 – VS6 от минимального значения до максимального в течение времени Тпуск, называемого временем пуска.
Обычно значение Uначсоставляет 30…60% от Uном, поэтому пусковой момент электродвигателя существенно меньше, чем в случае подключения электродвигателя на полное напряжение сети. При этом происходит постепенное натяжение приводных ремней и плавное зацепление зубчатых колес редуктора. Это благоприятно сказывается на снижении динамических нагрузок электропривода и, как следствие, способствует продлению срока службы механизмов и увеличению интервала между ремонтами.
Применение УПП также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 – 4 номинала тока двигателя, а не 5 – 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности

(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
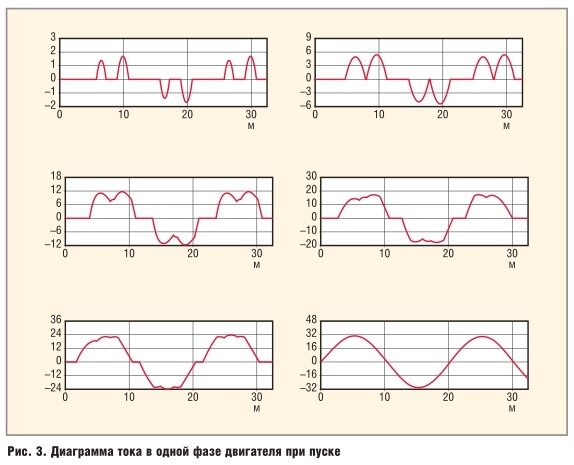
При торможении двигателя процессы происходят в обратном порядке: после отключения контактора К угол проводимости тиристоров максимален, напряжение на обмотках электродвигателя равно сетевому за вычетом падения напряжения на тиристорах. Затем угол проводимости тиристоров в течение времени Тторм уменьшается до минимального значения, которому соответствует напряжение отсечки Uотс, после чего угол проводимости тиристоров становится равным нулю и напряжение на обмотки не подается. На рисунке 3 приведены диаграммы тока одной из фаз двигателя при постепенном увеличении угла проводимости тиристоров.
На рисунке 4 приведены фрагменты принципиальной электрической схемы УПП. Полностью схема приведена на сайте журнала. Для её работы требуется напряжение трех фаз А, В, С стандартной сети 380 В частотой 50 Гц. Обмотки электродвигателя при этом могут быть соединены как «звездой», так и „треугольником“.
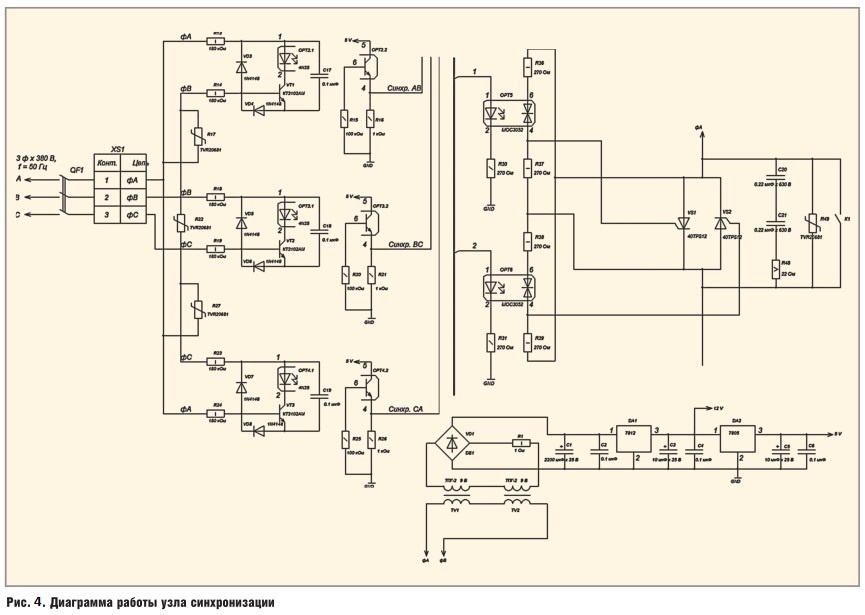
В качестве силовых тиристоров VS1 – VS6 применены недорогие приборы типа 40TPS12 в корпусе ТО-247 с прямым током Iпр= 35 А. Допустимый ток через фазу составляет Iдоп= 2Iпр= 70 А. Будем считать, что максимальный пусковой ток составляет 4Iном, откуда следует, что Iном < Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.
Параллельно тиристорам подключены демпфирующие RC-цепочки R48, C20, C21, R50, C22, C23, R52, C24, C25, предотвращающие ложное включение тиристоров, а также варисторы R49, R51 и R53, поглощающие импульсы перенапряжения свыше 700 В. Обходные реле К1, К2, К3 типа TR91-12VDC-SC-C с номинальным током 40 А шунтируют силовые тиристоры после завершения пуска.
Питание системы управления осуществляется от трансформаторного блока питания, запитанного от межфазного напряжения Uав. В блок питания входят понижающие трансформаторы TV1, TV2, диодный мост VD1, токоограничивающий резистор R1, сглаживающие конденсаторы С1, С3, С5, помехоподавляющие конденсаторы С2, С4, С6 и линейные стабилизаторы DA1 и DA2, обеспечивающие напряжение 12 и 5 В соответственно.
Система управления построена с применением микроконтроллера DD1 типа PIC16F873. Микроконтроллер выдаёт импульсы управления тиристорами VS1 – VS6 путём «зажигания» оптосимисторов ОРТ5-ОРТ10 (MOC3052). Для ограничения тока в цепях управления тиристоров VS1 – VS6 служат резисторы R36 – R47. Импульсы управления подаются одновременно на два тиристора с задержкой относительно начала полуволны межфазного напряжения. Цепи синхронизации с сетевым напряжением состоят из трёх однотипных узлов, состоящих из зарядных резисторов R13, R14, R18, R19, R23, R24, диодов VD3 – VD8, транзисторов VT1 – VT3, накопительных конденсаторов С17 – С19 и оптопар OPT2 – OPT4. C выхода 4 оптопар OPT2, OPT3, OPT4 на входы микроконтроллера RC2, RC1, RC0 поступают импульсы длительностью примерно 100 мкс, соответствующие началу отрицательной полуволны фазных напряжений Uab, Ubc, Uca.

Диаграммы работы узла синхронизации приведены на рисунке 5. Если принять верхний график за сетевое напряжение Uав, то среднийграфик будет соответствовать напряжению на конденсаторе С17, а нижний – току через фотодиод оптопары ОРТ2. Микроконтроллер регистрирует поступающие на его входы синхроимпульсы, определяет наличие, порядок чередования, отсутствие «слипания» фаз, а также производит расчёт времени задержки импульсов управления тиристорами. Входы цепей синхронизации защищены от перенапряжения варисторами R17, R22 и R27.
С помощью потенциометров R2, R3, R4 задаются параметры, соответствующие диаграмме работы УПП, приведённой на рисунке 2; соответственно R2 – Tпуск, R3 – Тторм, R4 – Uначи Uотс. Напряжения уставок с движков R2, R3, R4 поступают на входы RA2, RA1, RA0 микросхемы DD1 и преобразуются с помощью АЦП. Время пуска и торможения регулируется в пределах от 3 до 15 с, а начальное напряжение – от нуля до напряжения, соответствующего углу проводимости тиристора в 60 электрических градусов. Конденсаторы С8 – С10 – помехоподавляющие.
Команда «ПУСК» подаётся путём замыкания контактов 1 и 2 разъёма XS2, при этом на выходе 4 оптопары OPT1 появляется лог. 1; конденсаторы С14 и С15 производят подавление колебаний, возникающих вследствие „дребезга“ контактов. Разомкнутому положению контактов 1 и 2 разъёма XS2 соответствует команда „СТОП“. Коммутацию цепи управления запуском можно реализовать кнопкой с фиксацией, тумблером или контактами реле.
Силовые тиристоры защищены от перегрева термостатом B1009N с нормально-замкнутыми контактами, размещёнными на теплоотводе. При достижении температуры 80°С контакты термостата размыкаются, и на вход RC3 микроконтроллера поступает уровень лог. 1, свидетельствующий о перегреве.
Светодиоды HL1, HL2, HL3 служат индикаторами следующих состояний:
- HL1 (зелёный) «Готовность» – отсутствие аварийных состояний, готовность к запуску;
- HL2 (зелёный) «Работа» – мигающий светодиод означает, что УПП производит пуск или торможение двигателя, постоянное свечение – работа на байпасе;
- HL3 (красный) «Авария» – свидетельствует о перегреве теплоотвода, отсутствии или „слипании“ фазных напряжений.
Включение обходных реле К1, К2, К3 производится путём подачи микроконтроллером лог. 1 на базу транзистора VT4.
Программирование микроконтроллера – внутрисхемное, для чего используется разъём XS3, диод VD2 и микропереключатель Дж1. Элементы ZQ1, C11, C12 образуют цепь запуска тактового генератора, R5 и С7 – цепь сброса по питанию, С13 осуществляет фильтрацию помех по шинам питания микроконтроллера.
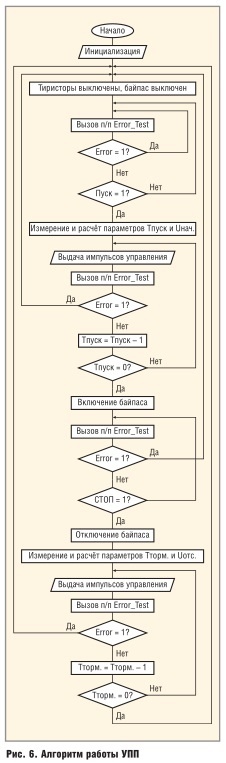
На рисунке 6 приведён упрощённый алгоритм работы УПП. После инициализации микроконтроллера вызывается подпрограмма Error_Test, которая определяет наличие аварийных ситуаций: перегрев теплоотвода, невозможность синхронизироваться с сетевым напряжением вследствие потери фазы, неверного подключения к сети или сильных помех. Если аварийная ситуация не фиксируется, то переменной Error присваивается значение «0», после возврата из подпрограммы зажигается светодиод „Готовность“, и схема переходит в режим ожидания команды „ПУСК“. После регистрации команды „ПУСК“ микроконтроллер производит аналого!цифровое преобразование напряжений уставок
на потенциометрах и расчёт параметров Тпуск и Uнач, после чего выдаёт импульсы управления силовыми тиристорами. По окончании пуска включается байпас. При торможении двигателя процессы управления выполняются в обратном
порядке.
Промышленные устройства плавного пуска, производимые ООО "Звезда Электроника" - ознакомиться здесь.




")






